
全国咨询热线
136-0026-2459


13600262459

 触摸屏拉力强度试验机
触摸屏拉力强度试验机
该试验机适用于金属、非金属材料的拉伸、压缩、弯曲、剪切、剥离、撕裂等多种试验,如:纸张、橡胶、塑料、电线电缆、复合材料、口罩、熔喷布、无纺布、塑料异型材、金属棒材、板材、弹簧、构件等。可执行GB、ISO、JIS、DIN、ASTM等多种试验标准,并可根据用户需求编辑试验软件。此款机器精度极高,是质检单位、科研部门、大专院校、工矿企业、生产制造企业必备的力学检测仪器。
技术参数:
|
容量选择 |
20、50、100、200kg、(多种量程选择) |
|
测力精度 |
示值的±0.3%以内 |
|
显示方式 |
5寸全触摸屏,中文/英文可切换 |
|
测试功能 |
测最大力、定力值、定位移、定时间 |
|
特色功能 |
可显示曲线、打印报告(KD-100G高配版可联电脑使用) |
|
试验结果 |
自动计算出最大力、最小力、平均力、拉伸强度等 |
|
打印配置 |
配备微型打印机,直接输出打印结果 |
|
力量单位 |
Kgf、lbf、N、g |
|
位移单位 |
mm、in、cm |
|
采样频率 |
200times/sec |
|
力分辨率 |
0.001kg |
|
位移分辨率 |
0.001mm |
|
传 感 器 |
拉、压两用传感器 |
|
拉伸空间 |
0-500mm(不含夹具) |
|
速度范围 |
0.1-500mm/min无级调速,数字输入 |
|
传动结构 |
步进电机+滚珠丝杆+同步轮+同步带 |
|
断点比率 |
0~99%,用户可跟据不同材料设定恰当的断裂停机时间 |
|
安全装置 |
上下极限行程限定装置 |
|
系统时间 |
系统时间、日期自动更新、断电记忆、断电更新 |
|
超载保护 |
超过最大负荷,机器自动停机 |
|
夹具配置 |
拉伸夹具一套(或指定) |
|
主机尺寸 |
约450×500×1200mm |
|
主机重量 |
约45 Kg |
|
供电电源 |
220V/50Hz |
产品参考图片:
第一步:接通电源,如下图所示:
第二步:编辑试样资料:点击“设置”,在“试样资料”界面输入相关信息。
第三步:编辑测试方案:点击“设置”,在“测试方案”界面输入相关的测试方法和控制参数。
第四步:测试结果选择:点击“设置”,在“测试结果”界面选择所需要的测试数据。如果需要设定剥离区间,先任意选择一个剥离测试结果(如剥离最大力),然后在剥离区间的起始点和结束点输入数据即可。
第五步:固定试样,在主界面点击“测试”,就可自动完成测试。
第六步:在主界面点击“查看”,可以查看有关的测试结果。点击“打印”,可以打印数据结果和图形。
备注:在“测试方案”中有三种“测试方案”可以选择:
一、力量达到:设置力量达到的任何数值(量程范围内),设置力量达到后保持的时间;
还可以设置:①力量达到减速系数,当力值达到:设定力值乘以此系数时,开始减速。
②速度减速系数,测试速度乘以此系数后,以此速度运行。
二、变形达到:设置变形达到的任何数值(量程范围内),还可以设置变形达到减速系数和速度减速系数。
三、断点:设置断点比例(如60%),测试中的当前力值下降到最大力值的60%时,或测试中的前后两点的力下降到60%时,判断试样断裂。
四、开始判断断点的力:进入测试,当力值达到这个设置的条件值时,才开始判断停机条件中的断点比率,此条件值一般设置为力传感器量程的1%比较合适。
五、开始计变形的力:点击测试,当力值达到此条件值时,才开始计算试样的 变形。
六、当做持拉(或持压)测试时,为使力值保持得更精准,可在“控制参数1”里面调整PID数值,只需调整P值,一般原则是:力值过冲、过大时,调小P值;反之,调大P值。建议每次以10倍调小或调大P值,直至调整到一个合适的P值。
校准
点击主界面“设置”,再点击“校准”,输入密码(默认为1070),进入下图:
校准包括力、位移、变形、速度的校准及其他一些设置。下面将一一介绍。
力传感器的校准
上图为力传感器校准界面:
连接传感器后,AD值有三位数(或两位数)的跳动可判断为正常。
校准大致步骤如下:
1. 点击右边的“归零”。
2. 在空载的情况下,“标准砝码值”输入0,点击“取点”。
3. 挂上砝码,如10kg,“标准砝码值”输入10(此处注意单位的转换关系),点击“取点”;从小到大依次挂上砝码,重复此步骤。
4. 依次可以取12个点,点击“切换”,可以取另外6个点。
5. 点击“保存”,提示“成功”。
6. 在空载情况下力归零,挂上砝码进行验证。
校准过程如下:
1. 选择力通道,如上图所示。力传感器通道共有四个:“200kgf”、“0kgf”、“0kgf”、“0kgf”(量程可设)。
2. 插上欲校准的力传感器,如量程为50kg的力传感器,选中一个力传感器通道。
3. 在“量程”输入框输入传感器的量程,如“50”kgf。
4. 在“零值”输入框输入传感器的零值力,一般输入“0.02”。
5. 点击“清空”,将校准表清空。
6. 校准第1点:将传感器空载,并在“标准砝码值”输入框输入“0”kgf,再点击“取点”,则第1点的AD值和标准砝码值被取入校准表。
7. 校准第2点:将传感器加载一定值的负荷,如挂上5kg的砝码,并在“标准砝码值”输入框输入负荷值“5”kgf,再点击“取点”,则第2点的AD值和标准砝码值被取入校准表。
8. 校准第3点:方法同第2点,但“标准砝码值”只能比第2点更大,否则校准会不准确。
9. 校准第4点:方法同第2点,但“标准砝码值”只能比第3点更大,否则校准会不准确。
10. 校准第5点:方法同第2点,但“标准砝码值”只能比第4点更大,否则校准会不准确。
11. 校准第6点:方法同第2点,但“标准砝码值”只能比第5点更大,否则校准会不准确。
12. 点击“切换”,可以校准另外6个点,方法同上。校准完毕,点击“保存”,如果提示“成功”,则完成一个力传感器的校准,如果提示“失败”,请再点几次。
13. 如果需要接第2个力传感器,则重复以上1~12步,否则请将其他传感器的量程全部设置为0。
14. 注意:至少应校准2个点。根据目前国内大多数传感器的特性,一般进行3点校准就能达到非常好的精度,第2个点一般取传感器量程50%,第3点一般取传感器量程的90%。如果校准3个以上的点(含3个点),必须保证后一个点的“标准砝码值”均必须比前一个点更大,否则校准会不准确。空载时“AD值”一般为8300000左右,传感器加载时“AD值”成比例变化,如果加载时“AD值”不变,说明硬件工作不正常,可能是力传感器已损坏或是控制板有故障,请与厂家联系更换。
15. 如果校准后发现测量力值与标准砝码有微小差别,可通过重新校准一次来解决,也可通过直接修改校准表中的标准砝码值数据来实现,如测量值比标准砝码值大,则可将校准表中的对应的标准砝码值改小一些,再点击“保存”按钮,再重新清零比对,直到两值大致相等为止。
位移传感器的校准
位移传感器的校准界面如下图所示:
校准位移传感器时先进行“归零”,原理同“力传感器的校准”,校准步骤可直接参考。
步骤如下:
1、点击右侧的“归零”按钮。
2、让机器向上或者向下运行一段距离。
3、量取机器运行的距离,在“实际位移”方框输入位移值(此处注意单位转换关系),点击“计算系数”,“位移系数”就会改变,校准完成。
橡胶伸长计(大变形)的校准
校准如下图所示: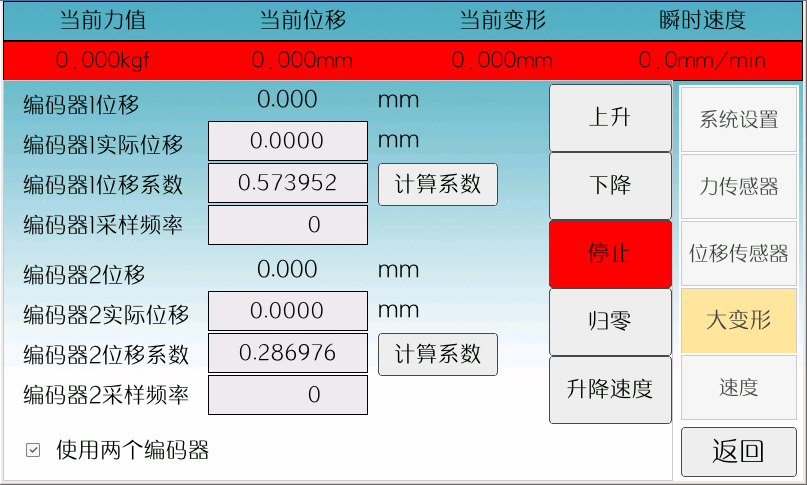
校准方法同“位移传感器”。
系统设置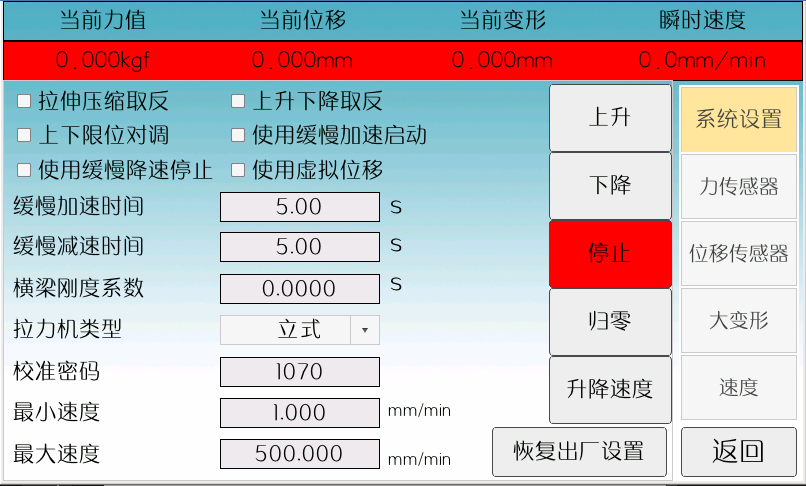
最大速度:为限制机器运行的最大速度。
最小速度:为限制机器运行的最小速度。
上升下降取反:在向上向下方向不正确的情况下,可勾选此选项。
拉伸压缩取反:在拉伸压缩方向不正确的情况下,可勾选此选项。
使用虚拟位移:有需要可勾选此项。
回位速度:在“测试方案”-“控制参数2”里设置(默认是500)。
校准速度
伺服校准:校准前,首先要先校准好位移,保证位移是准确的。
先点击“归零”,然后输入“校准速度”和“校准时间”,点击“开始校准”,机器停止后点击“计算系数”,“速度系数”就会改变,校准完毕。若要验证速度是否准确,在“定时时间”输入框内输入任一时间,点击“定时上升或下降”,就可验证速度是否准确。
立即留言,即可获得免费方案
每天前10名可享受优惠赶紧下手:
电话:13600262459(朱先生)
13268465460(朱先生)
QQ:876923148 邮箱:876923148@qq.com
邮箱:kedayiqi188@163.com 地址:东莞市塘厦镇138工业区
Copyright © 2023 东莞市科渡机电设备科技有限公司 版权所有 ICP备案/许可证号:粤ICP备2023038416号

 扫一扫加客服微信
扫一扫加客服微信  移动端,扫扫更精彩
移动端,扫扫更精彩